|
SemiDiscreteOT 1.0
Semi-Discrete Optimal Transport Library
|
Loading...
Searching...
No Matches
|
SemiDiscreteOT 1.0
Semi-Discrete Optimal Transport Library
|
Class to manage a hierarchy of point clouds with different resolutions The hierarchy is organized with coarser levels having fewer points (parents) and finer levels having more points (children). More...
#include <PointCloudHierarchy.h>
Public Member Functions | |
| PointCloudHierarchyManager (int min_points=100, int max_points=1000) | |
| Constructor. | |
| template<int spacedim> | |
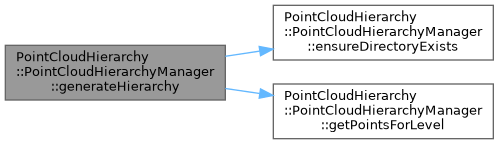
| int | generateHierarchy (const std::vector< Point< spacedim > > &input_points, const std::vector< double > &input_density, const std::string &output_dir) |
| Generate hierarchy of point clouds from input points. | |
| void | setMaxPoints (int max_points) |
| Set the maximum number of points for level 1. | |
| void | setMinPoints (int min_points) |
| Set the minimum number of points for coarsest level. | |
| int | getNumLevels () const |
| Get the number of levels in the last generated hierarchy. | |
| int | getPointCount (int level) const |
| Get the number of points at a specific level. | |
| int | getPointsForLevel (int base_points, int level) const |
| Calculate number of points for a given level. | |
| const std::vector< std::vector< size_t > > & | getParentIndices (int level) const |
| Get the parent indices for points at level L-1. | |
| const std::vector< std::vector< size_t > > & | getChildIndices (int level) const |
| Get the child indices for points at level L. | |
Private Member Functions | |
| void | ensureDirectoryExists (const std::string &path) const |
| Ensure directory exists, create if it doesn't. | |
| template<int spacedim> | |
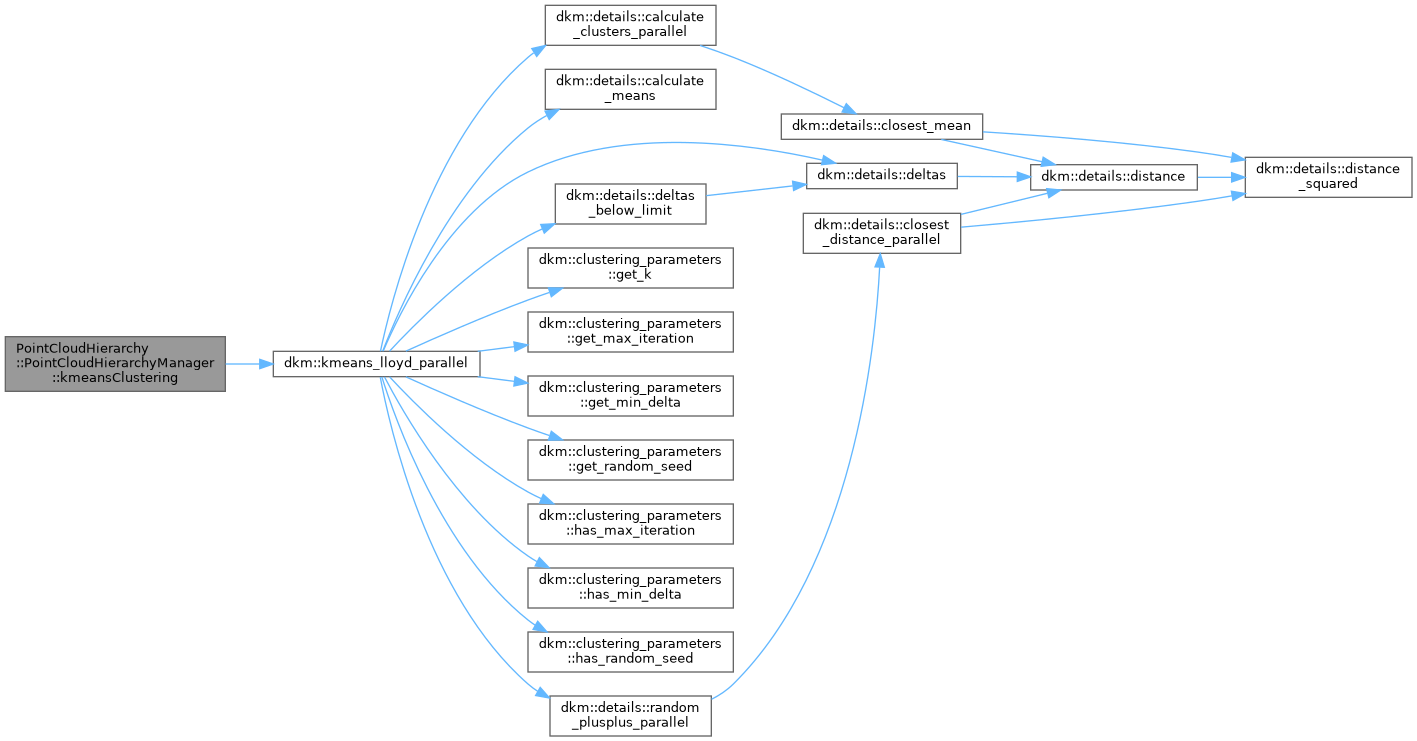
| std::tuple< std::vector< std::array< double, spacedim > >, std::vector< double >, std::vector< int > > | kmeansClustering (const std::vector< std::array< double, spacedim > > &points, const std::vector< double > &densities, size_t k) |
| Performs parallel k-means clustering on a set of points with parent-child tracking. | |
Private Attributes | |
| int | min_points_ |
| int | max_points_ |
| int | num_levels_ |
| std::vector< int > | level_point_counts_ |
| std::vector< std::vector< std::vector< size_t > > > | parent_indices_ |
| std::vector< std::vector< std::vector< size_t > > > | child_indices_ |
Class to manage a hierarchy of point clouds with different resolutions The hierarchy is organized with coarser levels having fewer points (parents) and finer levels having more points (children).
Definition at line 23 of file PointCloudHierarchy.h.
| PointCloudHierarchy::PointCloudHierarchyManager::PointCloudHierarchyManager | ( | int | min_points = 100, |
| int | max_points = 1000 |
||
| ) |
Constructor.
| min_points | Minimum number of points for the coarsest level (parent level) |
| max_points | Maximum number of points for level 1 point cloud |
Definition at line 18 of file PointCloudHierarchy.cc.
| template int PointCloudHierarchy::PointCloudHierarchyManager::generateHierarchy< 3 > | ( | const std::vector< Point< spacedim > > & | input_points, |
| const std::vector< double > & | input_density, | ||
| const std::string & | output_dir | ||
| ) |
Generate hierarchy of point clouds from input points.
| input_points | Vector of input points (finest level) |
| input_density | Vector of input density values (optional, uniform density if empty) |
| output_dir | Directory to save the point cloud hierarchy |
| std::runtime_error | if processing fails |
Definition at line 127 of file PointCloudHierarchy.cc.

| void PointCloudHierarchy::PointCloudHierarchyManager::setMaxPoints | ( | int | max_points | ) |
Set the maximum number of points for level 1.
Definition at line 24 of file PointCloudHierarchy.cc.
| void PointCloudHierarchy::PointCloudHierarchyManager::setMinPoints | ( | int | min_points | ) |
Set the minimum number of points for coarsest level.
Definition at line 28 of file PointCloudHierarchy.cc.
| int PointCloudHierarchy::PointCloudHierarchyManager::getNumLevels | ( | ) | const |
Get the number of levels in the last generated hierarchy.
Definition at line 32 of file PointCloudHierarchy.cc.
| int PointCloudHierarchy::PointCloudHierarchyManager::getPointCount | ( | int | level | ) | const |
Get the number of points at a specific level.
Definition at line 36 of file PointCloudHierarchy.cc.
| int PointCloudHierarchy::PointCloudHierarchyManager::getPointsForLevel | ( | int | base_points, |
| int | level | ||
| ) | const |
Calculate number of points for a given level.
Definition at line 63 of file PointCloudHierarchy.cc.

| const std::vector< std::vector< size_t > > & PointCloudHierarchy::PointCloudHierarchyManager::getParentIndices | ( | int | level | ) | const |
Get the parent indices for points at level L-1.
| level | The level of the parents (must be > 0) |
Definition at line 43 of file PointCloudHierarchy.cc.
| const std::vector< std::vector< size_t > > & PointCloudHierarchy::PointCloudHierarchyManager::getChildIndices | ( | int | level | ) | const |
Get the child indices for points at level L.
| level | The level of points whose children we want (must be < num_levels-1) |
Definition at line 50 of file PointCloudHierarchy.cc.
|
private |
Ensure directory exists, create if it doesn't.
Definition at line 57 of file PointCloudHierarchy.cc.

|
private |
Performs parallel k-means clustering on a set of points with parent-child tracking.
| points | Input points from finer level |
| densities | Input densities |
| k | Number of clusters (points at coarser level) |
Definition at line 80 of file PointCloudHierarchy.cc.
|
private |
Definition at line 86 of file PointCloudHierarchy.h.
|
private |
Definition at line 87 of file PointCloudHierarchy.h.
|
private |
Definition at line 88 of file PointCloudHierarchy.h.
|
private |
Definition at line 89 of file PointCloudHierarchy.h.
|
private |
Definition at line 93 of file PointCloudHierarchy.h.
|
private |
Definition at line 97 of file PointCloudHierarchy.h.